Měření a regulace otáček ventilátorů I.
Měření a regulace otáček ventilátorů I. |
|
Ventilátory jsou v současnosti již nedílnou součástí osobních počítačů. Jejich úkolem je nutné chlazení tepelně zatěžovaných součástek napájecího zdroje a také dalších komponent (procesor, grafické procesory a akcelerátory).
Výkonné ventilátory jsou obzvláště při plných otáčkách zdrojem značného hluku a proto se přešlo na regulaci otáček podle okamžité potřeby. Otáčky ventilátorů jsou regulovány dle teploty, která je snímána nejčastěji odporovými polovodičovými čidly bez převodníku (KTY81, KTY10 a pod) nebo s převodníkem
napětí/duty (SMT160-30 a pod.), popř. jinými typy (integrovanými snímači v monolitických obvodech). Podle charakteru snímačů či volby metody je zpracování naměřených hodnot buď analogové, jednodušší řešení, nebo číslicové, umožňující vyšší variabilnost a flexibilitu.
Než přistoupím k samotnému řešení regulátorů a principům měření otáček, zmíním se ve stručnosti o přehledovém a obvodovém řešení pohonů některých stejnosměrných ventilátorků.
| |
Pohony ventilátorků | |
Každý elektrický motor pracuje na principu točivého magnetického pole, které je vytvářeno proměnlivým magnetickým tokem v důsledku časově proměnného elektrického proudu, procházejícího příslušným vinutím či vodiči.
U stejnosměrně napájených motorů je této proměnlivosti dosahováno přepínáním, nebo-li reverzací vinutí prostřednictvím komutátoru, skládájícího se z pevné části, zpravidla uhlíkových kartáčů pevně spojených s hmotou
statoru a otáčejícího rotoru s plošnými kontakty komutátoru, které jsou elektricky spojeny s vinutím rotoru. Stator je obvykle v podobě magnetického válce, obklopující s menší vůlí (štěrbinou) vinutí rotoru.
Rotor je uložen a vystředěn v ložiskách (kluzná jsou méně hlučná, kuličková mají vyšší životnost).
Postupným otáčením rotoru dochází k přesouvání kartáčů na následující plošky komutátoru, odpovídající sousednímu rotorovému pólu a dochází tak k neustálému vytváření nových a
zánikům starých magnetických polí. Vhodnou konstrukcí a vzájemnou polohou všech těchto pólů je na základě tohoto principu vytvářeno točivé magnetické pole, vyvolávající silové účinky mezi statorem a rotorem.
| |
Komutátor je přirozeně zdrojem nežádoucího elektromagnetického rušení, ke kterému dochází na přechodu kartáč-rotor a to jednak při samotném otáčení v důsledku nedokonalého spojení, především však v okamžicích přechodu mezi jednotlivými komutačními póly rotoru.
Další nevýhodou mechanického komutátoru je vlastní opotřebení styčných ploch komutátoru a kartáčků, resp. kontaktů.
Z tohoto důvodu jsou moderní stejnosměrné ventilárky, používané v počítačích, řešeny již výhradně jako bezkomutátorové, u nichž je proudová reverzace realizována kaskádně řazenými, tranzistorovými spínači.
Rotor je zde naopak tvořen rozsegmentovaným feritem podle počtu statorových sekcí a je pevnou součástí vrtule ventilátorku. Statorem je soustava přepínaných cívek. Rychlost a okamžik přepnutí (úhel přepnutí) je
odvozen od Hallova senzoru, který v pevně stanovené poloze snímá orientaci magnetického pole feritového rotoru, viz obr.1.
| |
| |
Obr.1 Zapojení bezkomutátorového motoru | |
Strukturou je Hallův magnetický detektor 6851 podobný J-FET spínači s kolektorovým výstupem. Jakmile zachytí magnetické pole, kolmo k vektoru magnetické indukce B dochází buď k ochuzování či obohacování P-kanálu snímače dle směru vektoru indukce k ose kanálu ( k*B*I*sin fi, kde fi je uhel mezi vektorem B a I). Pokud dojde k ochuzení kanálu, výstup je uzavřený
a bází T1 protéká proud, který zapřičiní sepnutí T1. Tím dojde k vytvoření magnetických polí cívek L2 a L4 působících odpudivou silou vůči magnetickému poli
feritu. Při sepnutí T1 zanikne bázový proud T2, čímž se T2 uzavře. V tomto okamžiku se začne C2 nabíjet přes L1 a L3 a magnetické pole L1 a L3 postupně zaniká, dokud se C2 nenabije na plné napětí. Vrtule ventilátoru se tak otočí o 90° a Hallův senzor, zaregistrující nyní opačný směr magnetické indukce B feritu,
otevře svůj kolektorový výstup a přeruší bázový proud T1 tekoucí rezistorem R1. T1 se uzavře a s časovou konstantou C1 a L2 + L4 (druhá odmocnina součinu C2*(L2+L4)) zanikne magnetické pole cívek L2 a L4. Přes R2, L2 a L4 je otevřen T2, který spíná póly L1 a L3.
Situace se periodicky opakuje a tím je vytvářeno potřebné magnetické točivé pole, které svými silovými účinky vyvolá mechanický moment.
| |
| |
Obr.2 Zapojení bezkomutátorového motoru s integrovaným obvodem | |
Na obr.2 je další zapojení bezkartáčového (brushless) ventilátoru (fan). Zde je tranzistorový spínací stupeň nahrazen monolitickým spínačem, časové konstanty nutné k překrývání spínacích cyklů jsou vytvořeny posuvným registrem, který je taktován impulsy z integrovaného Hallova senzoru. Tato verze je vhodnější pro regulaci otáček pomocí pulsně-šířkové modulace (PWM).
Výstupní impulsy z IC1 jsou zpracovány T1, na jehož kolektoru dostáváme přibližně obdélníkový průběh dvojnásobné frekvence, než je počet otáček ventilátoru. Před dalším zpracováním je nutné tranzistorový výstup ošetřit Schmittovým KO, viz dále.
Tento typ ventilátoru poznáte podle třídrátového provedení. Napájecí žíla je vždy označena červenou barvou, zem černou a vývod pro měření otáček (z kolektor T1) je zpravidla žlutý, někdy světle modrý či bílý.
| |
Doplnění ventilátoru výstupem pro měření otáček | |
Vlastníte-li dvoudrátový cooler (viz obr.1) a potřebujete-li snímat jeho otáčky, můžete jej upravit dle následujícího návodu.
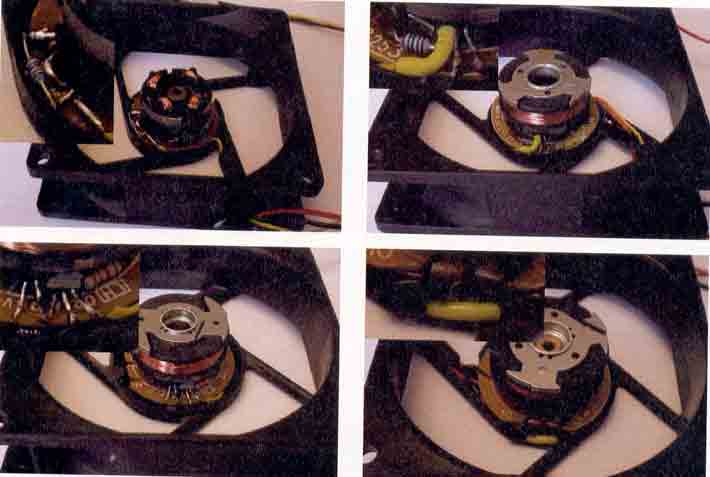
Odlepte zadní nálepku na ventilátorku, pod ní odstraňte zajišťovací krouček a sejměte vrtuli (pohled do vnitra některých typů na obr.3). Ohmetrem najděte a identifikujte výstup z Hallovy sondy na bázi T1 (vývod není uzemněn ani připojen k D1). Postupným proměřováním dle obr.1 nalezněte kolektor T2 a úpravou, zakreslenou
na obr.4 (červeně vyznačené schema), doplňte obvod o T3, R3 a R4. Přidané součástky vlepte vteřinovým lepidlem do prostoru statoru, popřípadě na kraj plošného spoje.
| |
| |
Obr.3 Detaily některých coolerů | |
Vzhledem k širokému sortimentu různých typů coolerů zjistěte kolik tranzistorových spínačů, resp. výstupů IC váš, takto upravený ventilátor, obsahuje. Motorky se často liší počtem pólů a tím i počtem impulsů, které připadají na jednu otáčku. To je nutné zohlednit ve vyhodnocovacím softwarru.
K měření otáček se na základních deskách v současnosti téměř výhradně používá obvodů řady LM78, LM26xx, například LM2637M, u kterého lze
programově nastavit děličku 1 až 4, t.j. i pro ventilátory, které produkují až 4 impulsy na otáčku (zapojení na obr.4 generuje 2 impulsy/otáčku).
| |
| |
Obr.4 Doplnění ventilátoru výstupem pro měření otáček | |
Analogové lineární regulátory | |
Nejjednodušší je řízení analogové, viz obr.5. Napětí pro ventilátor je vytvářeno neinvertujícím operačním zesilovačem IO1b se zpětnou vazbou z R9 a R10 (zesílením 2) posíleného výkonovým Darlingtonovým tranzistorem T1. Napěťí z děliče, tvořeného odporovým čidlem R1 (nebo termistor PTC) zobrazeného červeně, rezistorem R2 a trimrem R3 je porovnáváno s referenčním napětím na neinvertujícím vstupu IO1a.
Napěťová odchylka, zesílena IO1a, reguluje IO1b. Zesílení IO1a určuje hodnota zpětnovazebního rezistoru R8. Exponenciální tvar regulační charakteristiky docílíme náhradou termistoru NTC za R5 nebo R6. Dioda D1 udržuje minimální napětí na ventilátorech (cca 4.2V pro napájení 5V) a
zajišťuje tak minimální otáčky v případě, že bude pracovní bod regulátoru v důsledku nízké teploty pod touto napěťovou úrovní. Poklesem napětí pod 4V se totiž většina 12VDC ventilátorů zastaví (lopatky ventilátorů se chvějí, kmitají), přesto však motorky odebírají cca 30% jmenovitého proudu.
Prohozením teplotního čidla R1 s rezistorem R2 získáme regulátor zvyšující otáčky ventilátorů s poklesem teploty, což se například uplatní jako inteligentní regulátor klimatizace do výloh a výkladních skříní, kde dochází, úměrně s poklesem teploty v zimních měsících, k vyšší kondenzaci vodních par na skleněných výplních.
Dobře zvolenou regulační křivkou tak nahradíme finančně nákladnější regulátor s vlhkostním snímačem (Humidity senzor - článek o měření vlhkosti se připravuje) levnějším teplotním regulátorem.
| |
 | |
Obr.5 Analogový regulátor otáček | |
Na obr.6 je další zapojení lineárního regulátoru, tentokrát s jedním operačním zesilovačem IO2. Teplotní snímač je polovodičový s přechodem P-N v propustném směru a můžeme jej realizovat například běžnou křemíkovou diodou (viz D1) nebo přechodem B-E křemíkového tranzistoru (teplotní drift -2mV/K = napětí je lineární funkcí teploty). V případě použití tranzistoru je nutné spojit jeho bázi s kolektorem.
Princip regulátoru je následující: jakmile nastane zvýšení teploty, například o 1°C, klesne prahové napětí na přechodu diody D1 o 2mV a tím se zvýší napětí o 2mV na neinvertujícím vstupu operačního zesilovače IO2. Napětí na neinvertujícím vstupu je porovnáváno s referenčním napětím na invertujícím vstupu a rozdílová hodnota je zesilována úměrně hodnotě zpětnovazebního odporu R8.
Hodnotu R4 je nutné volit takovou, aby diodou D1 protékalo cca 1 až 2mA, neboť je nutné zajistit polohu pracovního bodu VA charakteristiky v I.kvadrantu. Při větším proudu by již dioda vyzařovala výkon a její teplota by byla vyšší než teplota okolí (chyba metody).
Pro vyzářený výkon platí: p=ud*i ,kde ud je napětí na diodě ud=up+rd*i a up je prahové napětí cca 650mV pro Si diodu při 25°C, rd její diferenciální odpor, dle typu desetiny až jednotky ohmů.
Referenční napětí pro IO2 je získáváno z řízeného referenčního zdroje TL431 (nastaveno cca na 5V). Výstup IO2 je výkonově posílen Darlingtonovou dvojicí BDW93C. Vzhledem k napěťovému úbytku na T1 cca 1.3V (roste s odběrem ventilátoru) je zpětná vazba IO2 přes R8 nikoliv z výstupu IO2, nýbrž až z emitoru T1.
Funkce diody D3 je stejná jako D1 v předchozím zapojení (opět platí: D3 není nezbytná). Dioda D2 potlačuje zesílení IO2 při poklesu napětí ventilátoru pod referenční napětí invertujícího vstupu OZ.
Trimrem R5 nastavíme pracovní bod regulátoru dle potřeby (otáčky ventilátoru), zvyšováním hodnoty odporu R5 otáčky vyšší, snižováním otáčky ubíráme.
| |
 | |
Obr.6 Jiné zapojení analogového regulátoru otáček | |
Analogové nelineární regulátory | |
Na obr.7 je velmi jednoduché zapojení nelineárního teplotního regulátoru, určeného pro chlazení výkonných stabilizátorů, kde je nutné zajistit důkladné ofukování žeber chladiče při vzrůstu teploty. Obvod vyžaduje pouze dva npn tranzistory, dva elektrolytické kondenzátory a několik rezistorů.
Funkce je následující: připojením napájecího napětí se začne nabíjet kondenzátor C1 až na hodnotu, danou poměrem odporového děliče R1 a R2, kde R2 je termistor NTC hodnoty 10k při 25°C. Zprvu je tedy T1 uzavřen a T2 sepnut, čímž je na ventilátoru po krátký okamžik plné, neregulované napájecí napětí
a ventilátor, pokud je funkční, se tak vždy rozeběhne. S nabíjením C1 se začne T1 otevírat a tím se uzavírá T2. V ustáleném stavu je stupeň T1,T2 proporcionálně řízen napětím na R1 a R2 dle teploty termistoru R2, t.j. s poklesem teploty se T2 uzavírá. Rezistor R7 udržuje minimální otáčky ventilátoru při uzavření T2 (nízká teplota na R2) a jeho hodnota je pouze orientační (pro ventilátor s odběrem větším než 150mA při 12V je nutné hodnotu R7 snížit. Pozor na výkonovou ztrátu na R7 P=U^2/R7).
| |
 | |
Obr.7 Analogový nelineární regulátor otáček | |
Na obr.8 je další zapojení nelineárního regulátoru. Tentokrát je snímacím prvkem termistor R3 s pozitivním teplotním koeficientem (PTC). Zvýšením teploty vzroste jeho odpor, čímž se začne více otevírat T1 a tím i T2. Odporovým děličem R5 a R6
je nastavena napěťová záporná zpětná vazba do emitoru T1 a tím je celý regulátor stabilizován. Princip je následující: zvýšením napětí na kolektoru tranzistoru T2 (resp. ventilátoru) vzroste v poměru R6/(R5+R6) i napětí na emitoru T1 a tím nastane pokles Ube1. Tento proces vede k uzavírání obou tranzistorů
na takovou úroveň, aby Ube1 odpovídalo regulačnímu rozsahu. Kondenzátor C1 způsobí vyšší otevření T1 v okamžiku připojení k napájení, čímž je zaručený dobrý rozjezd motorku ventilátoru.
Výhoda komplementární vazby npn T1- pnp T2 oproti odporovému (obecně impedančnímu) děliči R5, R6 (viz obr.7) je v možnostech vyššího zesílení regulátoru a tím i ve vyšší šanci zpětnovazebně nastavit lineárnější regulační křivku. Naučte se navrhovat komplementární zesilovače, neboť jsou konstrukčně méně složité a více spolehlivější, co se týče rozsahu dynamiky i napájecích podmínek.
| |
 | |
Obr.8 Jiné zapojení nelineárního regulátoru otáček | |